

自動運転AIチャレンジ2026
Overcome the Sim-to-Real gap and put your AI to the real test.
Compete to pioneer the future of mobility.
(About 600 Participants last year)
スポンサーの声
考える、感じる、ドライブするというのは、人と車のちょっとしたオマケでしかない。この大会は、単なるレーシングカートの自動化ではなく、みなさんの手で進めるモビリティ社会のアップデート作業です。この喜びを日本から世界へ。一緒に感動しましょう。
株式会社SUBARU
本大会では自動車ソフトウェアに関わるエンジニアの皆さまに、チャレンジの場、学習機会を提供しています。競技を通じて皆さまの技術スキル向上と参加者同士のコミュニティが広がることを期待しています。
本田技研工業株式会社
AIチャレンジは、誰でもが容易に参加でき、コミュニティなどを通じて、スキルアップを目指せる大会です。スキルアップを図り、モビリティとコンピューターの融合・進化を推し進めたいチャレンジャーの参加を期待しています。
トヨタ自動車株式会社
参加される皆様のオンラインコミュニティは大変活発で、情報共有・課題解決が非常にスピーディです。学生・社会人を問わず個人でも参加し易い環境で、交流を楽しん頂くとともに、経験・スキルを是非磨いて頂きたいと思います。
日産自動車株式会社
自動運転の技術課題
自動運転を支える 6 つの技術領域を、あなたのコードで解決していただきます。 今年は複数台でのレースに挑戦 — 障害物停止・追い越し・戦略構築という新しい挑戦が加わります。

NAV (Car Navigation)
自己位置推定・経路計画GNSS / IMU を統合し、ノイズや遅延に強い高精度な自己位置推定を実現していただきます。

ACC (Adaptive Cruise Control)
アダプティブ・クルーズコントロール目標速度を追従しつつ、急加減速時にも崩れない滑らかな速度制御を実装していただきます。
LKA (Lane Keeping Assist)
車線維持支援計画経路への高精度な追従と、操舵遅延を考慮した先読み制御を構築していただきます。
PCS (Pre-Collision System)
衝突被害軽減ブレーキ前方車両を検知し、車間距離に応じて安全に停止する制御を解決していただきます。

LCA (Lane Change Assist)
追い越し支援他車との干渉を避けつつ追い越し可否を判断し、安全な軌道を生成する課題に挑んでいただきます。
FSD (Full Self-Driving)
完全自動運転 / レース戦略他車の動きを読みながら、周回全体で勝ち筋を組み立てる戦略を設計していただきます。
身につくスキルは JSAE の SDV スキル標準 (31 職種の技術マップ) に直結 — 業界共通言語であなたのキャリアが描けます。
ゼロから書く必要はありません
今年度は 6 種類のサンプルコードを用意しました。 古典的アルゴリズムから最新の VLM まで、あなたの出発点を選んでください。

VAD
Vectorized Scene Representationベクトル化シーン表現を用いた End-to-End 自動運転モデルを学ぶ。

Tiny Lidar Net
軽量 LiDAR End-to-EndLiDAR 点群から走行制御を直接推論する End-to-End モデル。CPU のみでも実行可能。

Multi Purpose MPC
汎用モデル予測制御モデル予測制御による車両制御と障害物回避。最適化ベースの経路追従を実装。

BERT-Tiny
軽量 Transformer による制御言語モデルを経路計画に応用し、Trajectory から車両制御値を推論する手法を学ぶ。

Pilot Net
軽量 画像 End-to-End画像ベースの End-to-End 自動運転。カメラ画像からステアリング角度を直接推論する。

Simple Pure Pursuit
幾何学的経路追従幾何学ベースの経路追従アルゴリズム。ルールベース制御の基礎を学ぶベースライン。
サンプルコードは 岐阜大学 のチームによる OSS 貢献、 GMO インターネットグループ をはじめとするスポンサー各社の支援、 および歴代の AI チャレンジ・A2RL 優勝チームのコントリビューションによって支えられています。
Sim と Real をつなぐ開発サイクル
各ステップをクリックすると、対応するプラットフォーム機能やドキュメントが表示されます。
Online Dashboards
オンラインダッシュボードを通じてリアルタイムで順位変動を可視化しています。各チームのパフォーマンスや順位の推移を動的に表示することで、競技の展開を臨場感を持って観戦いただけます。このインタラクティブな仕組みにより、技術競技としての緊張感と観戦の魅力を両立させ、参加者・観覧者双方にとって充実した体験を提供しています。


Submission Ranking
チームの提出回数やシミュレーション成功率といった各種メトリクスを可視化し、各チームの取り組みの過程を定量的に表現しています。単純な順位だけでなく、試行錯誤の回数や改善の軌跡など、技術開発における努力のプロセスを明確に示すことで、優勝に至るまでの技術的な挑戦と成長のストーリーを浮かび上がらせています。これにより、観戦者は自身が共感できるチームを見つけ、より深い技術競技への理解と関心を持っていただけるよう設計しています。
コミュニティと共にスキルアップ
コミュニティの力を借りて大会を楽しみ、コミュニティに貢献できるようになりましょう。
初心者だからと遠慮する必要はありません。始めたばかりの視点だからこそ、役立つ気づきが生まれます。書いたコードや取り組みもぜひ公開してみてください。Open Source Software 貢献賞も用意しています。
特別なスキルは必要ありません。自動運転に興味がある、それだけで十分です。まずは参加から、慣れてきたら運営側へ。主催するメンバーにはメンターシップ賞も用意しています。

走行の結果は、ぜひ SNS でシェアしてください。あなたの挑戦が、次の誰かの一歩につながります。盛り上げてくれた方には、SNS アンバサダー賞も用意しています。

動画にまとめたり、その熱量を発信したり。そうした表現も立派な参加のかたちです。心に響く作品には、メディアクリエイティブ賞も用意しています。


よくある質問
参加費用はかかりますか?
参加費用は無料です。その他、交通費や宿泊費などが必要な場合は参加者様ご自身でご負担ください。
チームでの参加は可能ですか?
はい、可能です。代表者を1名決定し、応募の際に参加登録フォームに記入してください。
チームに自動運転に詳しい人がいないと参加が難しいでしょうか?
自動運転に詳しい人がいなくても全く問題ありません。実際に初めて自動運転を学ぶ高校生の方々にもご参加いただいております。
エントリー後に参加登録情報の変更は可能ですか?
参加登録情報の変更は、応募期間内であれば可能です。変更が必要な場合は、運営までご連絡ください。
過去大会参加者の参加も可能ですか?
もちろん可能です。ご応募お待ちしております。
どんなOSやスキルが必要ですか?
Ubuntu 22.04 を推奨環境としています。Windows/Mac はデュアルブート、WSL2、仮想マシン、クラウド環境からの参加も可能です。C++ または Python の基礎知識があれば挑戦可能で、初心者向けのドキュメント・教材も提供しています。
予選大会と決勝大会はどう違いますか?
予選大会はオンラインで、AWSIM (Unity ベースのシミュレータ) 上で自動運転アルゴリズムを評価します。決勝大会では、予選で開発したコードを実車のレーシングカートに搭載して走行競技を行います。
どこから参加登録できますか?
JSAE(自動車技術会)公式サイトの参加申込フォームから登録します。登録完了後、運営からアカウント情報がメールで届き、本サイトのダッシュボードにログインできるようになります。
参加登録フォームを開く過去のQ&Aや技術情報はどこで見られますか?
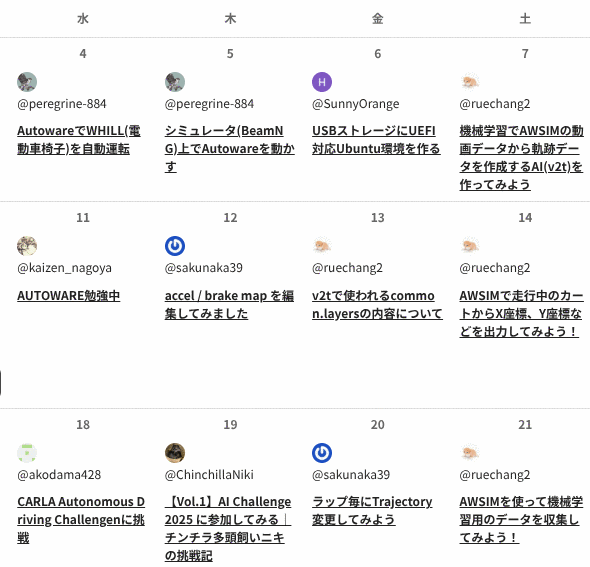
AIC Documentation(公式ドキュメント)と、Qiita のアドベントカレンダーに過去の知見が蓄積されています。X (@jaac_official) でも最新情報を発信しています。
自動運転の未来を
あなたの手で
3 ステップで登録できます。